


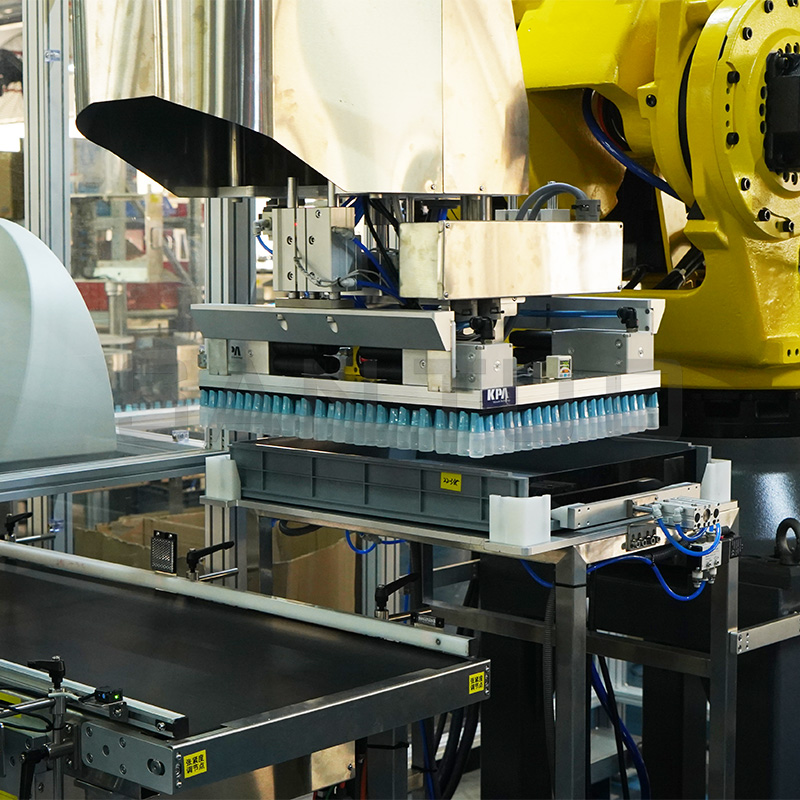


Through camera photography, the spatial coordinates of the material tray are obtained by the vision system, guiding the robot to automatically move and pick up full trays for unstacking and automatically grab empty trays for stacking and palletizing. After the full trays of bottles are output, they are photographed again by the camera, and the vision system automatically extracts feature points to automatically count the quantity. This achieves unmanned operations including automatic unstacking of full trays, automatic transfer and output of full trays, automatic counting, and automatic stacking and palletizing of empty trays.
To unstack and count bottles such as capped and flat-surfaced vial bottles, oral liquid bottles, and eye drop bottles, as well as to detect the number of bottles on pallets.
|
Device Model |
SR-205 |
|
Scope of Application |
Automatic de-palletizing, loading, counting, and palletizing of plastic bottles |
|
Conveying Speed |
3-25m/min |
|
Feeding Speed |
1 small tray/min |
|
Operating Pressure |
≥0.6Mpa |
|
Power Supply and Power |
380VAC 50/60HZ 12KW |
|
Dimensions |
L4400*W3060*H2300mm |

